Active Vision: Vision-based Manipulation
Grasp Synthesis
The Goals
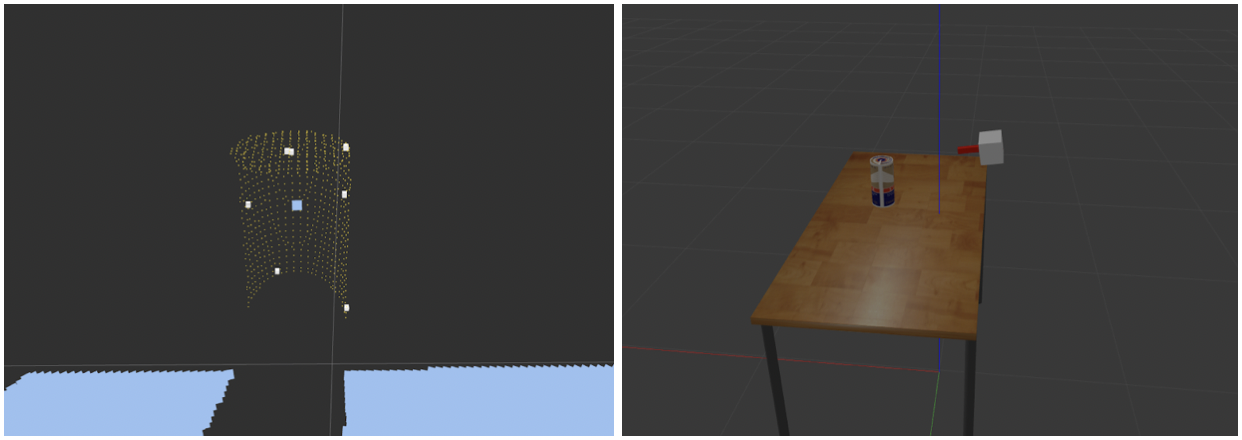
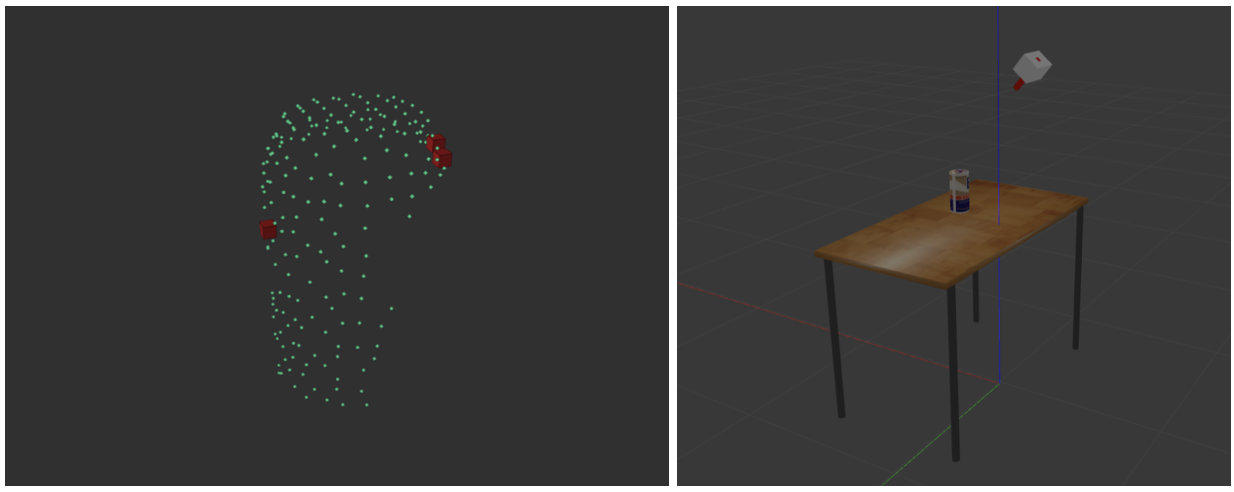
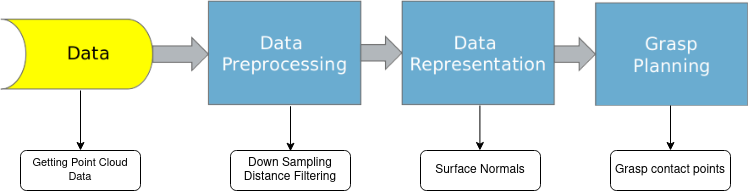
Implement Active Vision by moving the camera to multiple locations, calculating the best grasp locations in every viewpoint, and finding the overall best grasp in the respective viewpoints. In this project, we follow the grasping pipeline which consists of Data Preprocessing with downsampling and segmentation, Data Representation with normal calculations, and Grasp Synthesis using force vector formulation. We then visualize the resulting Point Cloud object and the contact points of the best grasp in RViz.
What I did
- Developed a data prepocessing pipeline to increase the accuracy of extracting Point Cloud object.
- Implemented Active Vision using Point Cloud Stitching to maximize stability of the grasp.
- Assisted in Grasp Planning: calculting the most optimal grasping points on the object with force vector formulation
- Set up simulation environment in Gazebo and configurations for visualization tool Rviz.