Ball sorting system using 3-DOF robot manipulator
The Goals
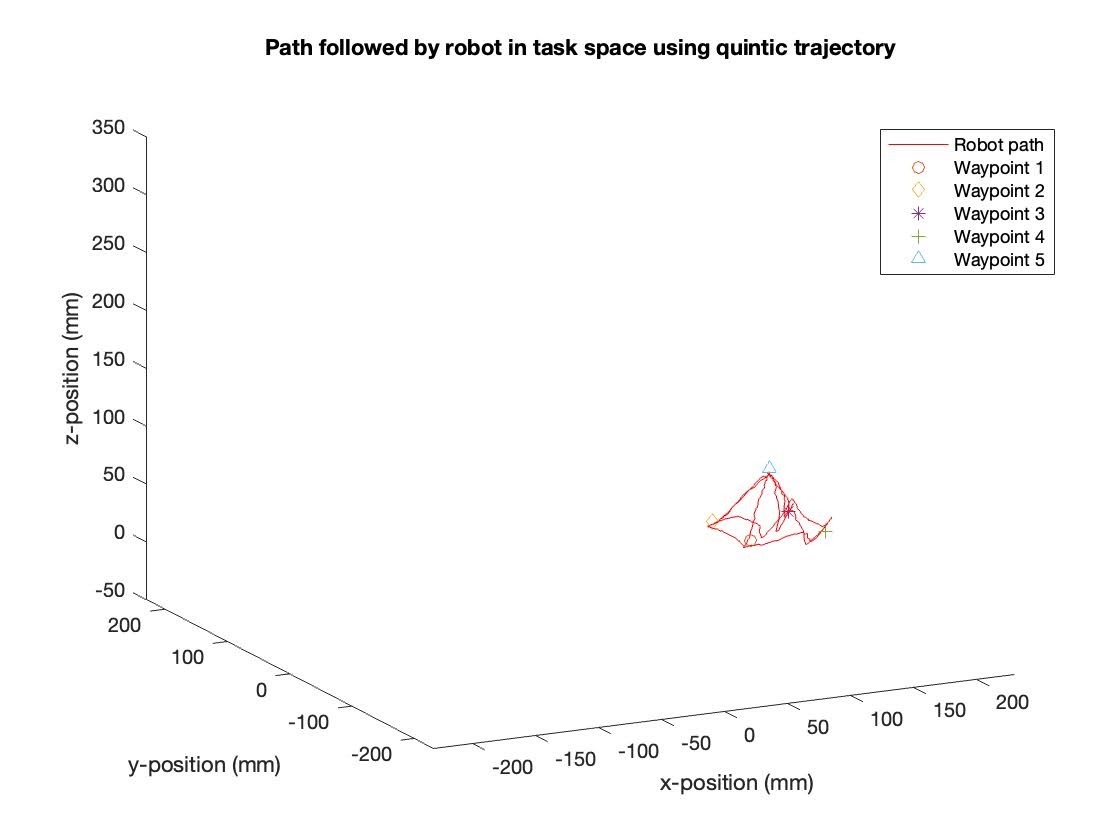
For Unified Robotics III: Manipulation, I worked with two other students on developing a ball sorting system using a 3-DOF robot manipulator. To instruct the robot to move at a certain velocity and to a specific destination, we calculated forward and inverse kinematics based on the configurations of the robot arm. We then experimented with multiple trajectory generation methods, such as cubic and quintic polynomial methods, to generate trajectory in task space and joint space. To enable computer vision for color thresholding, I designed an image processing pipeline which processes the image captured in the camera to usable information. After calibrating the camera, and transforming different frames, I implemented a finite state machine that will autonomously and continuously sort balls on the checkerboard until all balls are sorted by colors.
What I did
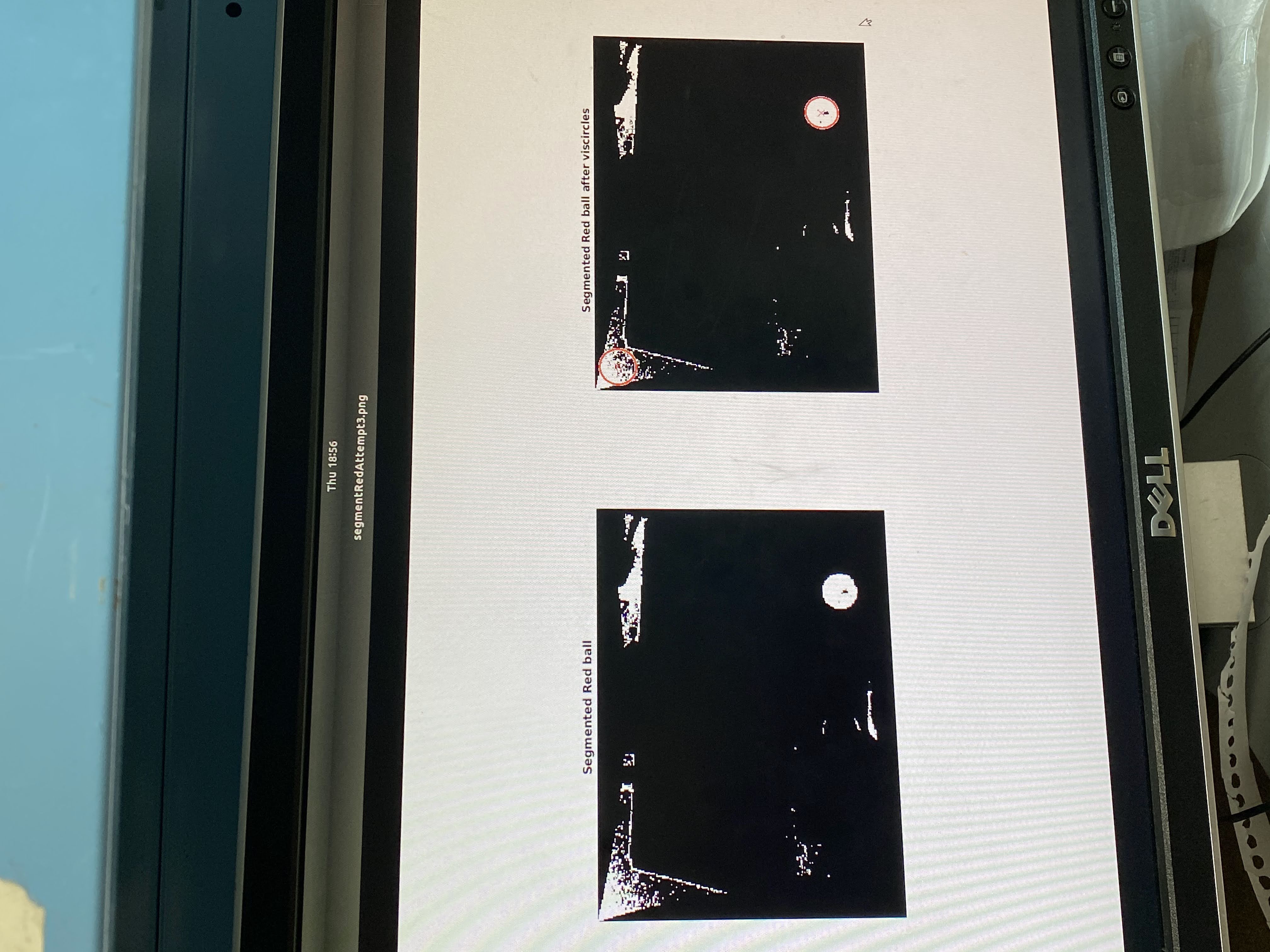
- Taught the robot to identify different colors and sort colored balls by designing and implementing an image processing pipeline in MATLAB.
- Programmed and designed the system architecture and finite state machine of 3-DOF robotic manipulator ball sorting system.
- Calculated forward and inverse kinematics for task-space and joint-space trajectory planning.