Solar panel Installation Robot
The Goals
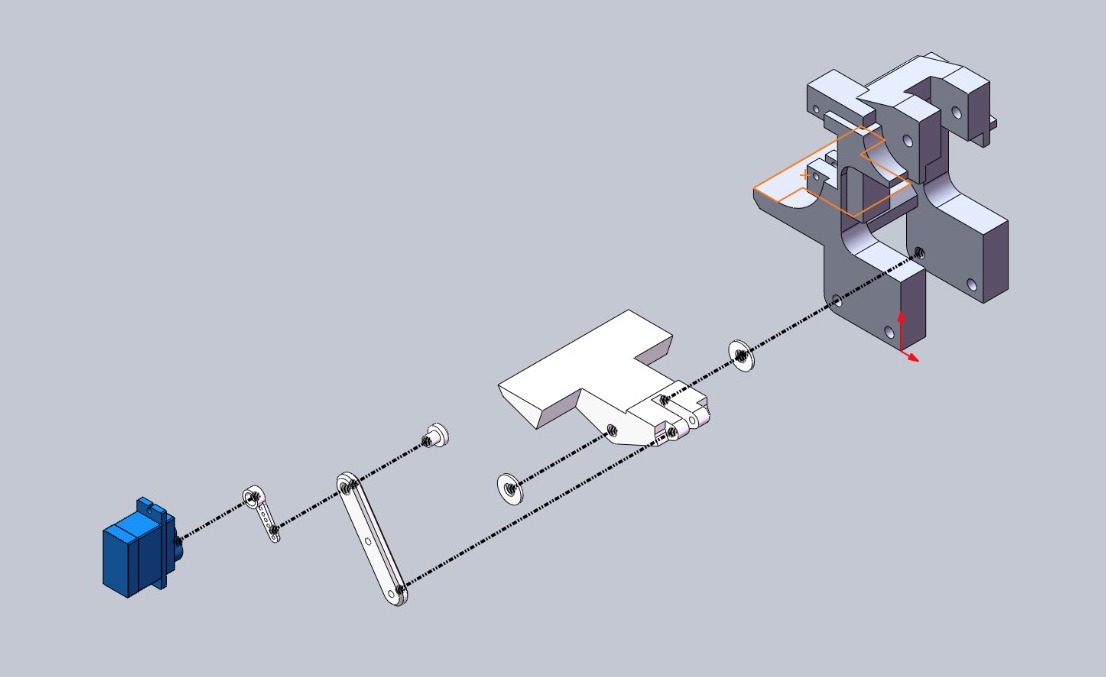
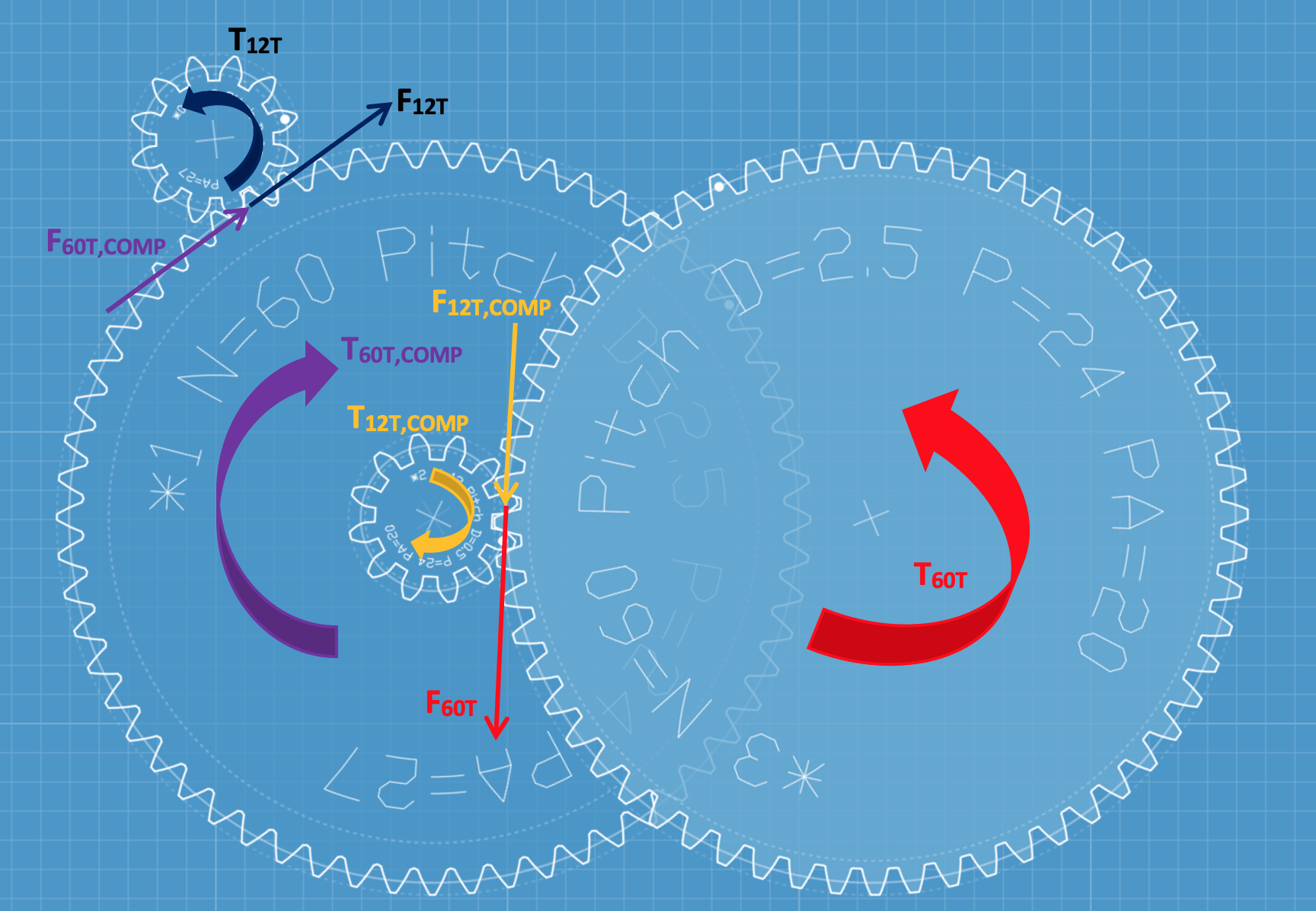
For Unified Robotics I: Actuation, I worked with two other students on building a robot that is capable of placing and picking up solar panels on a rooftop. The robot first navigates to the rooftop, and retrieves a solar panel. It then navigates to a dropoff area to drop off the previous solar panel, and pick up a new panel. At the end, it navigates back to the rooftop, securing the panel on top of the rooftop. We utilized the Pololu Romi Robot kit as the chassis of the robot, and designed the lifting and gripper mechanism in SOLIDWORKS. We designed a four-bar mechanism as the lifting mechanism, which will be able to extend to pick up the panels, and retrieve to detach the panels from the roof. We performed stress analysis and gear transmission analysis to ensure the efficiency and feasibility of our mechanisms. The mechanisms are designed in SOLIDWORKS, and are 3D-printed in PLA materials at our university’s makerspace. The environment that the robot will operate in is marked with lines, and therefore, we implemented two Infrared Line Sensors to enable autonomous navigation. Using a finite state machine and a remote controller, we can instruct the robot to perform tasks according to different stages of the process.
What I did
- Designed and constructed robot with 3D-printed components to perform tasks on sloped rooftops such as removal and installation of solar panels.
- Achieved robot autonomous navigation within the test field by implementing feedback control in C++ and performing stress analysis on gears design.
- Assisted in designing a four-bar and gripper mechanism in SOLIDWORKS.
© 2016 Free HTML5. All Rights Reserved. Designed by FreeHTML5.co Demo Images: Unsplash