Semi-autonomous pizza delivery robot, “Clef”
The Goals
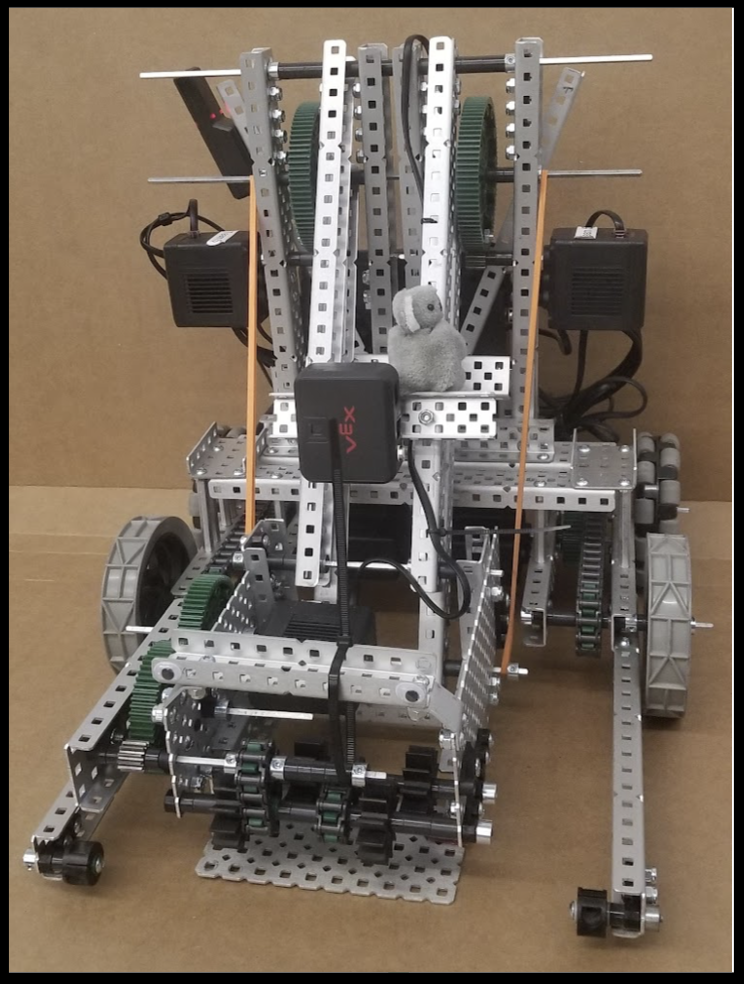
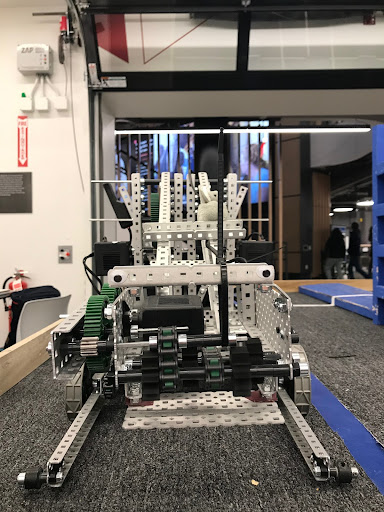
For the in-class competition of Introduction to Robotics, I worked with two other students on designing and constructing an efficient and robust semi-autonomous robot that picks up wooden blocks (the pizza) on the ground and delivers them to cabinets of different heights (the floors). The robot retrieves the wooden blocks on the ground or from a drop-off window. It then navigates to the cabinets utilizing Infrared Line Sensors and a Finite-state machine, and dispenses the wooden block in the cabinets. We were given a robot chassis that was constructed using VEX V5 components. To decide on a lifting mechanism, we designed two different mechanisms, one with a four-bar and one with chain. After several design reviews, we continued the robot design with the four-bar mechanism, since we thought it was faster and more consistent. We then played around with different gripping mechanisms, such as a standard claw gripper and sets of intake rollers. Considering the efficiency and versatility, we decided to use intake rollers as the intake mechanism, which spin clockwise for intake and anti-clockwise to dispense the wooden blocks. To allow the robot to run both autonomously and manually, a Finite-state machine is used to switch between modes. PID control is also implemented for driving autonomously, the wheel velocity and direction adjust to stay aligned with the lines on the ground. Image processing and color thresholding are implemented using VEX tools, the vision sensor enables the robot to identify the height of the cabinets as they are labeled.
The competition was graded based on the number of tasks completed and number of “pizza” delivered. There were 15 project teams in the competition, and we were able to win 2nd place. We named our robot “Clef” as we reckon it makes a melodious noise when the intake wheels are running.
What I did
- Achieved autonomous navigation within test field using feedback control.
- Programmed robot to extend its manipulator to reach different height and switch between autonomous and manual modes using finite state machine.
- Assisted in designing and constructing the lifting and gripping mechanisms.
- Competed with 15 project teams and won 2nd place.