Bimodal Quadruped Robot
(Project In Progress)
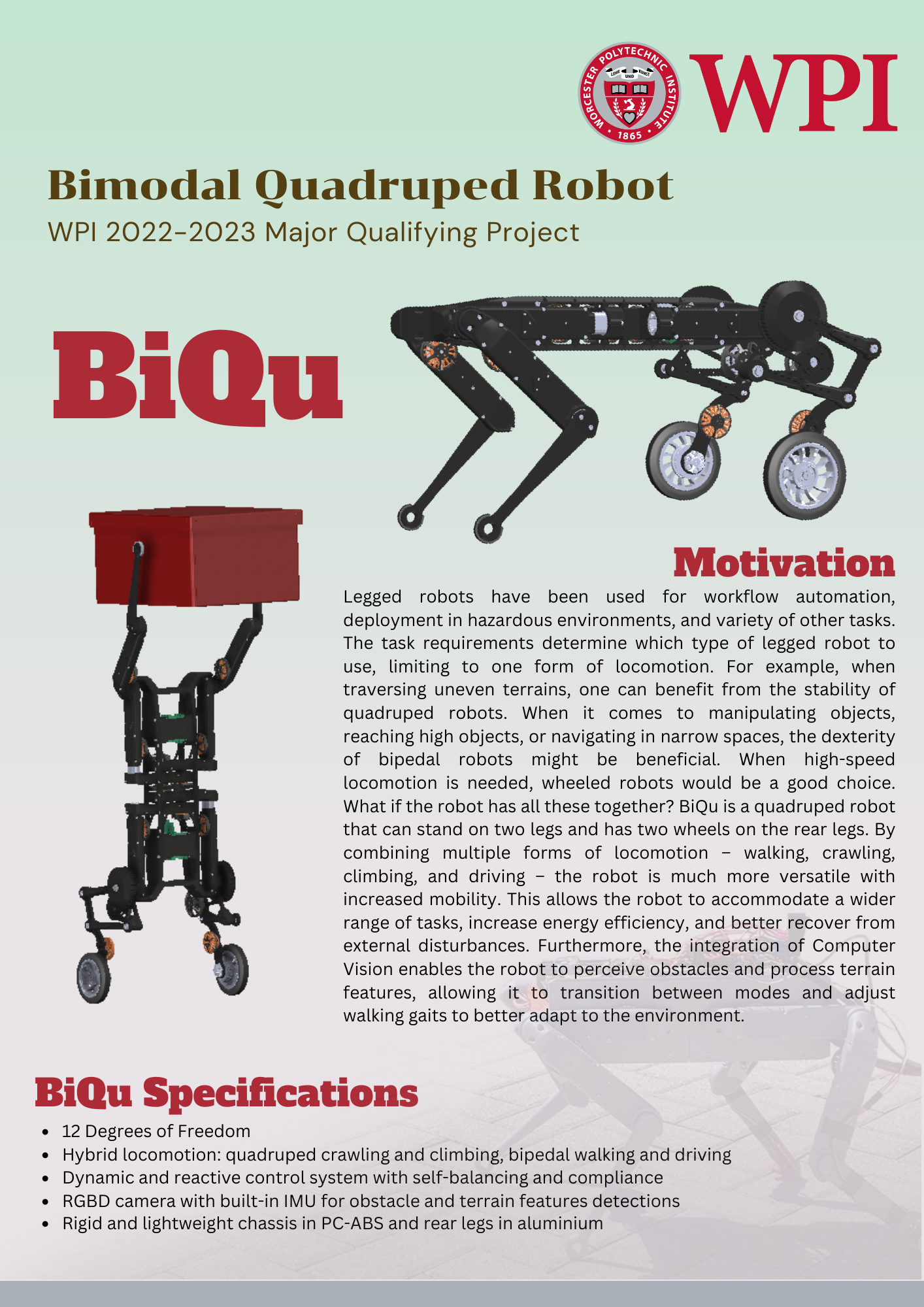
The Goals
For my capstone project, I work with four other students to continue a multi-years project on developing a robot that is capable of quadrupedal walk and bipedal walk. The goal of the year is to improve on the robot’s gait generation and control with an integration of computer vision and control system, and modify the existing bipedal mechanism into a wheel-legged mechanism. By the end of senior year, we expect the robot to be capable of following a person while avoiding obstacles and walking on different surfaces.
What I did
- Check out the repository here!
- Upgrade quadruped robot with additional hip joints to increase the Degree of Freedom (DOF) from 8 to 12, improving robot's walking and balancing capability
- Develop gait control system and trajectory planning to improve robot walking performance in quadruped mode.
- Fabricate and assemble components for the new 12-DOF robot.
- Organize Bill of Materials (BOM) and minimize project cost by reorganizing inventory from previous years for reusable parts.
- Collaborate with team working on bipedal mode to integrate a bipedal wheel-legged robot with the quadruped robot.
- Assist in implementing robot vision to allow real-time obstacle detection.
- Organize grant proposal and advertising materials for funding.